学术相关
Helping Small Businesses Become More Data-Driven: A Field Experiment on eBay1
Latent Stratification for Incrementality Experiments2
一文总结特征增强&个性化在CTR预估中的经典方法和效果对比
业界动态
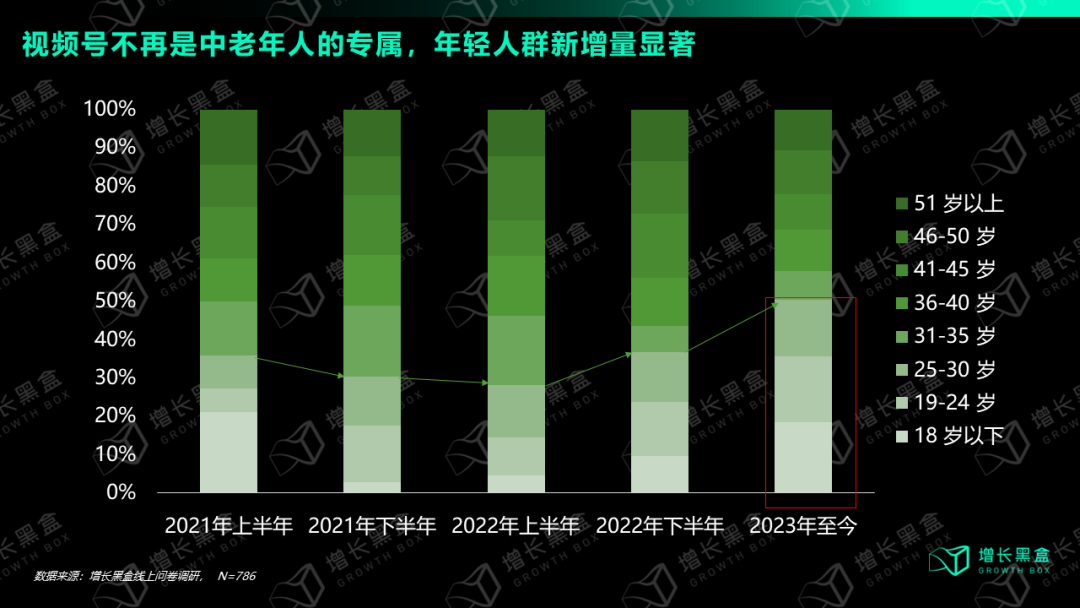
增长黑盒丨2023消费行业的8个新增量
- 腾讯视频号
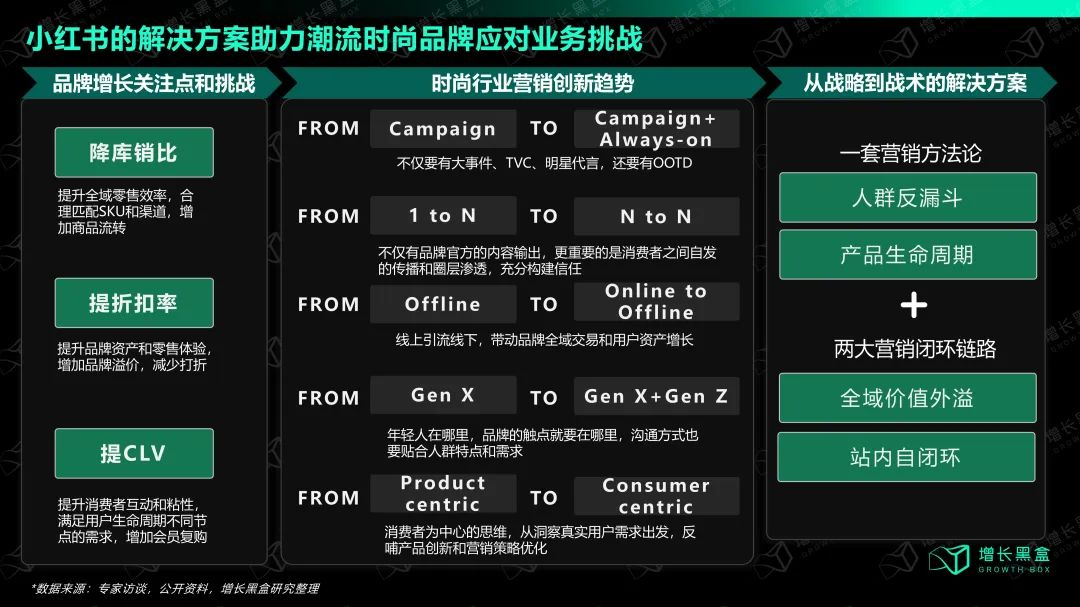
- 小红书
- 抖音电商
- 抖音电商规模突破2万亿,同比增速超过60%
- 抖音货架电商渠道GMV占比超过30%
DataFun丨零售数据可视化平台产品实践与思考
火山引擎丨泛互联网行业A/B测试全解析:产品优化的创新之道
左林右狸丨Temu与跨境仓配的蛋鸡问题
技术技巧
Django丨tinymce富文本编辑器
也可以单独嵌入到前端中,非常轻量级,业内常用
八卦丨Posit
Pandas作者Wes McKinney以首席架构师身份加入Posit,主要发展PyData生态
谢益辉由于理念与商业化不合,从Posit离职,独立进行开源软件开发
娱乐
集智丨一文读懂具身智能:方法、进展及挑战
具身智能:研究在环境中具有(物理)实体的智能体如何通过与环境的交互来取得认知能力,学习并掌握新技能新知识的一个人工智能的子领域
深度学习范式下,具身智能主要集中在模仿学习与强化学习,整体上模仿学习数据成本高,强化学习的奖励函数需要反复迭代且样本效率低。
早期具身智能难以完成基本的泛化任务,直至2021年左右,人们直觉上意识到“这些任务并非相互独立的,而是以一种组合形式互相关联,并且这种组合相关的形式与其自然语言描述存在一定的同构性”。学者们通过将语言任务嵌入,发现存在具身智能零样本泛化的可能性,近期的具身智能大模型也是沿着这一路径进一步规模化。
问题
目前的具身智能模型仅输出机器人末端执行器轨迹,中间连接轴的运动是通过逆向动力学以闭合解的形式获取的,本质上这种方法意味着机器人的具体形态被人为地抽象掉了,模型不关心具体形态,其导致的局限性是机器人无法灵活运用身体组成部分完成任务,只能采取固定的方法。
另外,目前具身智能解决的是以桌面环境为视觉背景的任务,极大地简化了对视觉认知能力的要求,不要求其视觉自监督学习学习到世界的结构化表征,进而使学习到的策略无法直接应用在复杂的非结构化背景环境中。而且,目前没有证据表明基于模仿学习的方法可以通过大规模预训练涌现出新的技能。
基于强化学习的方法无需认为构建复杂数据集,只需要与环境交互,优化奖励函数即可,但无法直接获取环境动力学的梯度信息,样本效率很低,通常采用构建环境模拟器或额外学习环境模型方法缓解问题。目前同样尚无证据表明基于强化学习的方法训练出的智能体能够涌现出对任务和环境的认知能力,必须人为干预。
- 需要人类智能介入
- 不具备从自然模态中学习到环境的结构化表征与抽象的能力
- 任务指定问题,指定任务需要海量信息
- 任务目标与数学描述存在差异
小马过河丨运筹学的反直觉案例
布雷斯悖论 Braess Paradox
在一个拥堵的道路网络中添加一条道路反而会导致整体的旅行时间加长
-
no-wait flow-shop paradox
车间调度问题中,对无等待流水车间的某些机器增加速度可能会恶化最佳完工时间
运输悖论
当需求/供给数量减少时,运输成本可能提高
最长路径问题
网络中寻找最长路径比最短路径难得多
开放车间调度问题
-
Bar-Gill, S., Brynjolfsson, E., & Hak, N. (2024). Helping Small Businesses Become More Data-Driven: A Field Experiment on eBay. Management Science. https://doi.org/10.1287/mnsc.2021.02026 ↩
-
Berman, R., & Feit, E. M. (2024). Latent Stratification for Incrementality Experiments. Marketing Science. https://doi.org/10.1287/mksc.2022.0297 ↩